
(CNN) — A robot developed at Stanford University in California has dived into shipwrecks and sunken planes in a way that humans can’t. Called OceanOneK, the robot also allows its operators to feel like underwater explorers.
OceanOneK captures the underwater world in full color and resembles a human diver from the front, with hands, arms and eyes with 3D vision.
At the back of the robot are computers and eight multidirectional thrusters that help it maneuver carefully around fragile submerged ships.

OceanOneK, doing an experiment in a pool here at Stanford University, looks like a human diver.
The robot’s haptic (touch-based) feedback system lets the person feel the resistance of the water and the contours of the artifacts as the operator uses the controls to operate the OceanOneK on the ocean surface.
OceanOneK’s realistic tactile and visual capabilities are enough to make people feel like they’re plunging into the depths, without the dangers or immense underwater pressure experienced by a human diver.
Stanford University roboticist Usama Khatib and his students began sending the robot on dives in September in collaboration with deep-sea archaeologists. The team completed another underwater expedition in July.
So far, OceanOneK has examined the sunken Beechcraft Baron F-GDPV, the Italian steamship Le Francesco Crispi, a 2nd century Roman ship off Corsica, a WWII P-38 Lightning and the submarine Le Protect.
Crispi is about 500 meters (1,640 ft) below the surface of the Mediterranean Sea.
“You move so close to this amazing structure that something amazing happens when you touch it: You really feel it,” said Khatib, a professor at the Stanford School of Engineering and director of the Stanford Robotics Laboratory.
“I’ve never had an experience like this in my life. I can say I was the one who touched the 500 (meter) Crispy. And I did it, I touched it, I felt it.”
OceanOneK could be the start of a future of underwater exploration that is too dangerous for humans, allowing us to see the oceans in a whole new way.
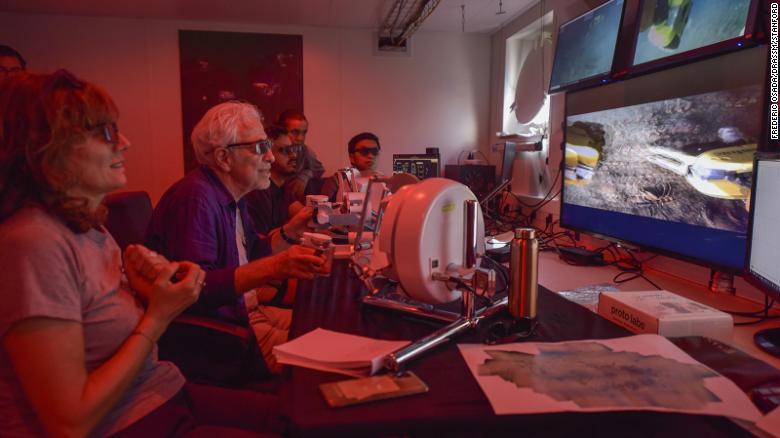
Stanford University roboticist Usama Khatib (second from left) uses the robot’s feedback system to sense sensations in his hands.
Building an underwater robot
Khatib said the challenge in developing OceanOneK and its predecessor, OceanOne, was to create a robot that could withstand the underwater environment and the immense pressure at various depths.
OceanOne, launched in 2016, is exploring La Lune, the shipwrecked flagship of King Louis XIV, located 100 meters (328 feet) below the Mediterranean Sea, 32 kilometers (20 miles) off the south of France. The shipwreck of 1664 remained untouched by man.
The robot retrieved a vase the size of a grapefruit, and Khatib felt sensations in his hands as OceanOne touched the vase before placing it in the retrieval basket.
The idea for OceanOne grew out of a desire to study coral reefs within the Red Sea at depths beyond the normal range for divers. The Stanford team wanted to combine artificial intelligence, advanced robotics and haptic feedback to create something as close to a human diver as possible.
The robot is about 1.5 meters (5 feet) long, and its brain can register how carefully to handle an object without breaking it, such as coral reefs or sea-eroded artifacts. An operator can control the bot, but it is equipped with sensors and loaded with algorithms so it can work autonomously and avoid collisions.
Although OceanOne was designed to reach a maximum depth of 200 meters (656 feet), the researchers had a new target: 1 kilometer (0.62 miles), hence the new name OceanOneK.
The team modified the robot’s body using special foam containing glass microspheres to increase buoyancy and combat pressures of 1,000 meters, 100 times higher than humans experience at sea level.

OceanOneK goes through an object grab test in a Stanford swimming pool.
The researchers upgraded the robot’s arms with a spring and oil mechanism that prevents compression when descending into the ocean depths. OceanOneK also got two new types of arms and increased arm and head movements.
The project comes with challenges not seen in any other system, said Stanford School of Engineering PhD candidate Wesley Guo. “It takes a lot of innovative thinking to make those solutions work.”
The team used the Stanford Recreational Pool to test the robot and carry out experiments such as carrying a video camera into a pen and collecting objects. Then came the final test for OceanOneK.
Deep dives
On a tour of the Mediterranean that began in 2021, OceanOneK dived to these successive depths: 124 meters (406 ft) for the submarine, 334 meters (1,095 ft) for the remains of the Romanian ship, and finally 852 meters (0.5 miles) to show that it is capable of diving nearly 1 kilometer. . But it has not been a smooth road.

OceanOneK captures the cargo of an ancient Roman ship.
Guo and another Stanford doctoral student, Adrian Pietra, had to fix one of the robot’s crippled arms on the deck of their boat at night during a storm.
“For me, the robot was eight years in the making,” Pietra said. “You have to understand how every part of this robot works: what can go wrong, and things will always go wrong. So it’s always like a puzzle. Being able to dive deep into the ocean and explore some wrecked shipwrecks. It’s very exciting not being able to see it up close.

Students work to fix a problem with OceanOneK during the cruise.
During OceanOneK’s deep dive in February, crew members discovered the rover was unable to ascend when they stopped to check the thruster. The line piled on top of the robot as the buoys on the communication and power lines collapsed.
They managed to fix it and OceanOneK’s descent was successful. He left a commemorative sign on the ocean floor that reads, “A robot’s first touch on the deep sea / A vast new world for humans to explore.”
Khatib, a professor of computer science, called the experience an “incredible journey.” “This is the first time a robot can go so deep, interact with the environment and allow a human operator to sense that environment,” he said.
In July, the team revisited the Roman ship and Crispy. While all the former have disappeared, its cargo remains scattered on the seabed, Khatib said. In a Roman shipyard, OceanOneK successfully collected ancient vases and oil lamps that still bear the maker’s name.
The robot carefully placed a boom camera inside Krispy’s broken hull to capture video of coral and rust patterns as bacteria feast on the ship’s steel.

The robot extends a boom camera into the hull of the Italian steamer Le Francesco Crispi.
“We go all the way to France for the trip, where, surrounded by a very large group, coming from a wide range of backgrounds, you realize that this part of the robot that you worked on at Stanford is actually a part. A very large one,” Pietra said.
“You realize how important it is, how innovative and important it can be, and what it means for science in general.”
A promising future
Born from an idea in 2014, the project has a long future of planned expeditions to lost underwater cities, coral reefs and deep shipwrecks. OceanOneK’s innovations form the foundation for safer marine engineering projects such as ship, dock and pipeline repair.
An upcoming mission will explore a sunken steamboat in Lake Titicaca on the border of Peru and Bolivia.
But Khatib and his team have even bigger dreams for the project: space.
Khatib said that the European Space Agency has expressed interest in the robot. A haptic device on the International Space Station will allow astronauts to interact with the robot.
“They will be able to interact with the robot deep in the water, and it will be amazing because it will simulate the mission of doing this on another planet or another moon,” Khatib said.
; Third win in a row")




/cloudfront-us-east-1.images.arcpublishing.com/eluniverso/ESZCYCVTMHULRF4XLKFETXEN2U.jpg "The phrase about the origins of Argentina, Brazilians and Mexicans is critical of President Alberto Fernandez. International | News")


{kind=link}